Education

|
-
Doctor of Philosophy
ISAT Laboratory, School of Industrial Engineering, Purdue University, West Lafayette (Jan 2011 - Aug 2015)
Institute of Accessible Science, Purdue University (Jan 2011 - Dec 2013)
- Thesis: Effective and Interactive Interpretation of Gestures by Individuals with Mobility Impairments (Confidential)
- Advisors: Juan P. Wachs and Bradley S. Duerstock
-
Master of Science in Electrical Engineering
Electrical Engineering, Harbin Institute of Technology, Shenzhen, China (Sep 2008 - Dec 2010)
-
Bachelor of Science in Electrical Engineering
Electrical Engineering, Harbin Institute of Technology, Harbin, China (Sep 2004 - Aug 2008)
|
Relevant Courses
- Computer Sciences & Engineering
|
- Mathematics & Statistics
- STAT 511: Statistical Methods (Fall 2011)
- STAT 529: Bayesian Decision Theory (Summer 2012)
- IE 537: Optimization Models and Algorithms (Spring 2013)
- IE 633: Dynamic Programming (Spring 2014)
- Real Analysis (Spring 2009)
- Convex Optimization (Fall 2009)
|
- Robotics & Control
- IE 633:Dynamic Programming (Spring 2014)
- Robotic Manipulation (Fall 2009)
- Principles of Automatic Control
- Fundamental Theory of Modern Control System
- System Modeling and Simulation
- Motion Control System Design
|
Recent Research
1. Effective and Interactive Interpretation of Gestures by Individuals with Mobility Impairments
|
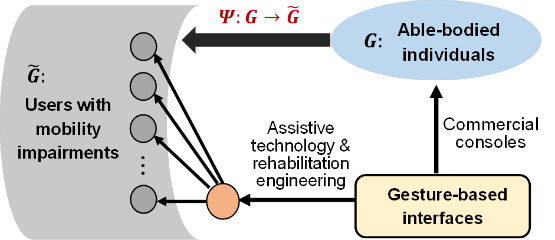
There has been an increasing attention in the adoption of commodity cameras and gaming based technology to support and complement rehabilitation therapies for users with upper extremity mobility impairments (UEMIs). Innovative applications leveraging on Kinect® and Wii® based technologies have been integrated in rehabilitation programs as part of a new paradigm often referred as exergaming – exercising while playing. These platforms involve the use of physical expressions, such as gestures, as the main form of interaction. Such platforms offer an alternative to traditional rehabilitation sessions, in order to improve rehabilitative outcomes and prevent rehospitalization. The problem is that such platforms rely on gesture interfaces, which are designed primarily for individuals without motor limitations, thus excluding a critical mass of users with some degree of UEMI who could benefit from this technology. The assistive technologies (AT) community has addressed this challenge through customizing hand gesture-based interfaces for specific quadriplegic users, which is tedious, time-consuming, and costly. There is no systematic method to convert existing gesture interfaces (designed for individuals without disabilities) to usable interfaces for persons with UEMIs.
|
|
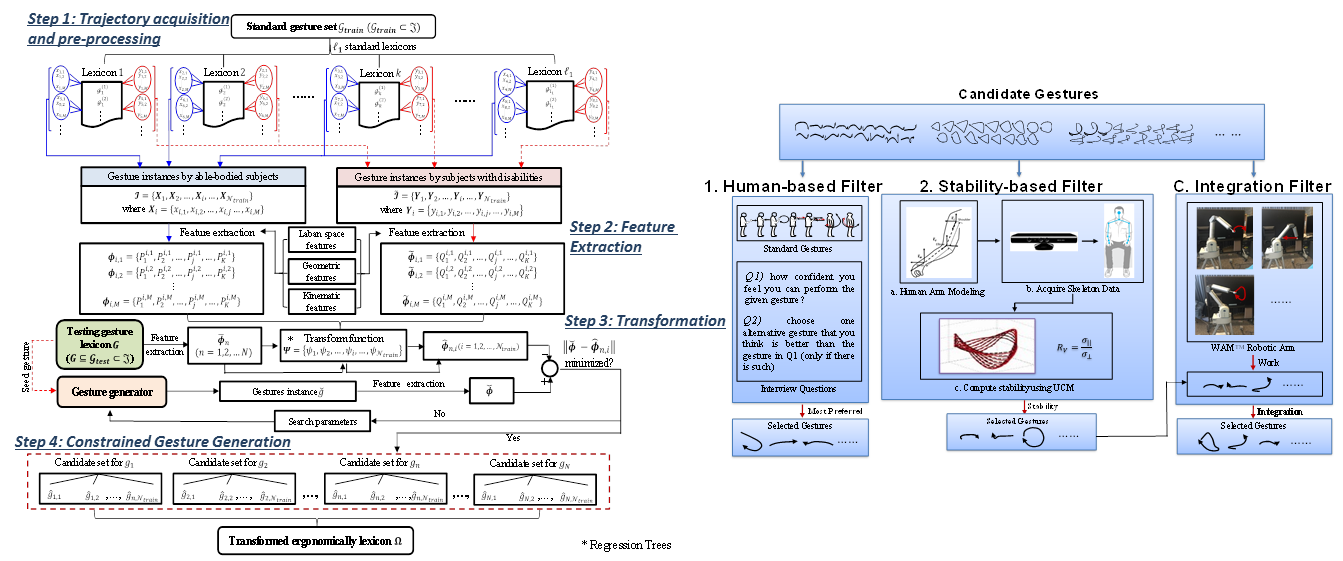
The objective of this research is to solve this hurdle by proposing a framework to establish guidelines, metrics, and procedures for the design of gesture sets (lexicons) suitable for users with UEMIs using fundamentally scientific sound principles. The key idea is to project the existing patterns of gestural behavior from persons without disabilities to match those exhibited by users with quadriplegia due to common cervical spinal cord injuries (SCIs). Two approaches (a user-centered and an analytic approach) have been developed and validated to provide users with quadriplegia with both individualized and universal solutions. The feasibility of the proposed methodology was validated through simulation and user-based experiments. Through these studies, it was found that subjects with UEMIs preferred gestures generated by our approach rather than the standard gestures (thirty-six out of forty-two constrained gestures).Gesture-variability analysis was conducted to further validate the gesture sets, and finally robotic execution was used to mimic gesture trajectories. Based on this, a physical metric (referred as work) was empirically obtained to compare the physical effort of each gesture. An integration method was presented to determine the accessible gesture set based on the stability and empirical robot execution. For all the gesture types, the accessible gestures were found to lie within 34% of the optimality of stability and work. Lastly, the gesture set determined by the proposed methodology was practically evaluated by target users in experiments while solving a spatial navigational problem.
|
Selected paper: An Analytic Approach to Decipher Usable Gestures for Quadriplegic Users
[top]
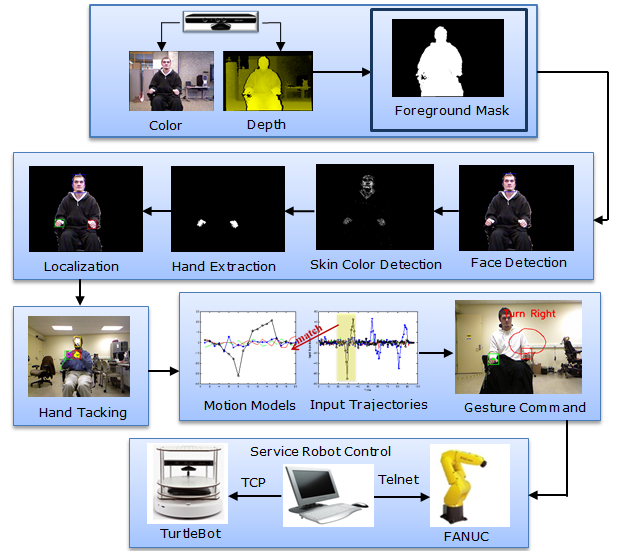
2. Integrated Gesture Recognition based Interface for People with Upper Extremity Mobility Impairments 

|
Proposed a 3D particle filter framework based on color and depth information for robust face and hand tracking
Incorporated an interaction model utilizing spatial and motion information to tackle the “false merge” and “false labeling” problem through hands’ interaction and occlusion
Obtained an optimized parameters set using neighborhood search and achieved a tracking accuracy of 98.81%
Encoded acquired trajectories using Dynamic Time Warping and obtained 95.9% on dynamic hand gesture recognition using extended CONDENSATION algorithm
Applied the proposed gesture-based interface to multi-robot control and collaboration
Implemented gesture-based interface using C++ with Windows platform and robotic control using KAREL, and Robot Operation System (ROS) with Linux platform
|
Selected papers: A Machine Vision-Based Gestural Interface for People with Upper Extremity Physical Impairments;
An Optimized Real-time Hands Gesture Recognition based Interface for Individuals with Upper-level Spinal Cord Injuries
[top]
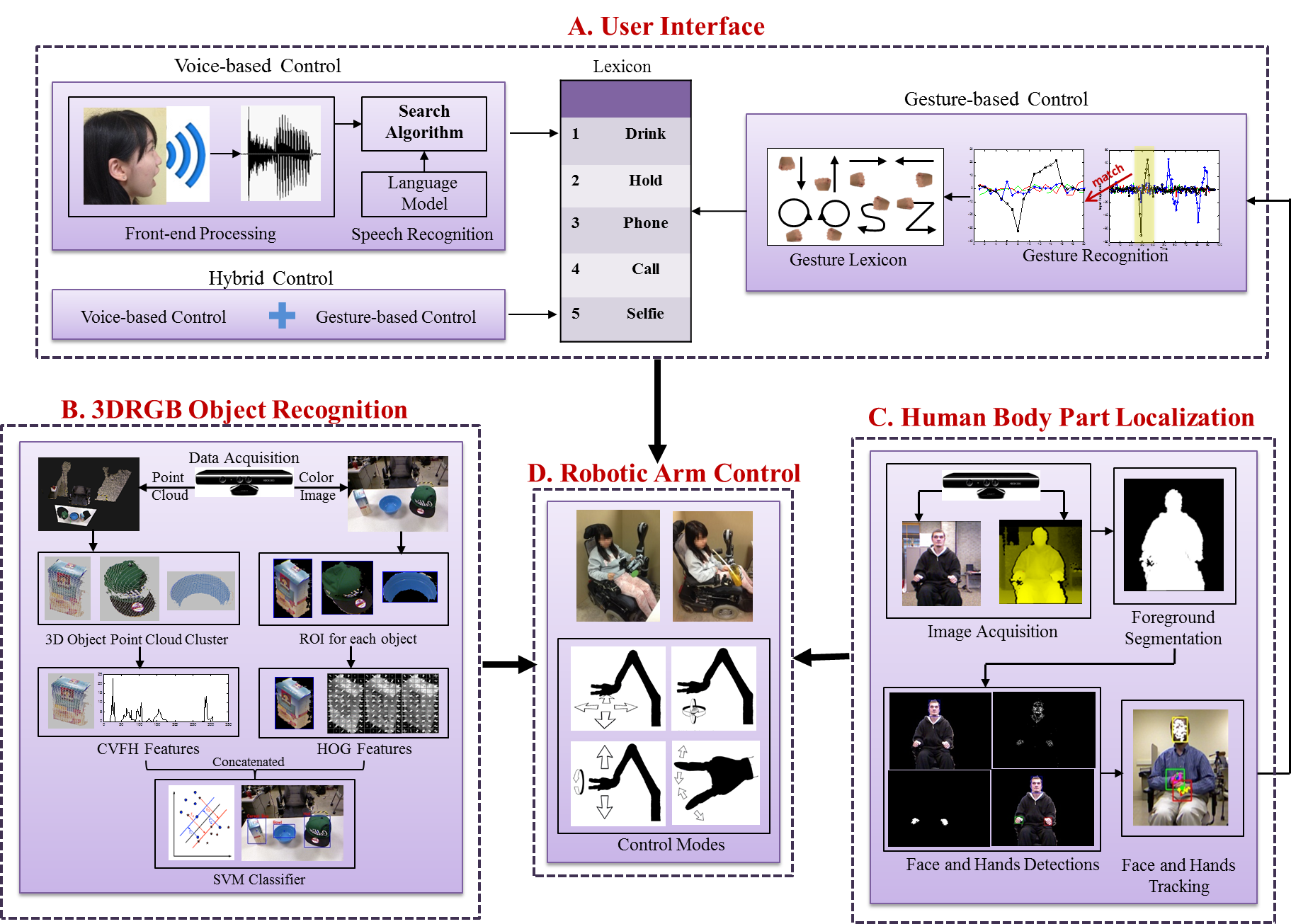
3. Multimodal Vision-based System for Efficient, Automated Control of a Robotic Manipulator
|
Developed a novel multimodal vision-based robotic system containing two Kinect sensors, a wheelchair mounted commercial robotic arm allowing users with motor impairments to use natural interaction (recognized gesture and speech commands in real time) reliably
Investigate 2D/3D object recognition algorithms to detect and recognize daily living objects
Implemented the system with C++, C#, LibSVM library, OpenCV, and GNU
|
Selected papers: Integrated Vision-based System for Efficient, Semi-automated Control of a Robotic Manipulator;
Autonomous Performance of Multistep Activities with a Wheelchair Mounted Robotic Manipulator Using Body Dependent Positioning
[top]
4. 3D Joystick for Robotic Arm Control by Individuals with High Level Spinal Cord Injuries
|
Developed an innovative 3D joystick to enable independent and efficient operation of a robotic arm
Compared different input modalities and evaluated the system using the Fitts’s law measurement
Implemented the 3D joystick with C++ and robotic control with C#
|
Selected paper: 3D Joystick for Robotic Arm Control by Individuals with High Level Spinal Cord Injuries
[top]
Publications
[1] Hairong Jiang, Ting Zhang, Juan P. Wachs, and Bradley S. Duerstock, "Enhanced Control of a Wheelchair-mounted Robotic Manipulator using 3-D Vision and Multimodal Interaction''
Computer Vision and Image Understanding, available on line at April 7, 2016
[2] Hairong Jiang, Bradley S. Duerstock, and Juan P. Wachs "User-Centered and Analytic-Based Approaches to Generate Usable Gestures for Individuals With Quadriplegia'' IEEE Transactions on Human-Machine Systems (THMS), 99: 1-7, 2015
[PDF]
[3] Hairong Jiang, Chun-hao Hsu, Bradley S. Duerstock, and Juan P. Wachs ''Determining Natural and Accessible Gestures using Uncontrolled Manifold and Cybernetics'' in Proceedings of the 2015 IEEE International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, Sep 28-Oct 2, 2015
[PDF]
[4] Hairong Jiang, Bradley S. Duerstock, and Juan P. Wachs, ''A Machine Vision-Based Gestural Interface for People with Upper Extremity Physical Impairments'' IEEE Transactions on Systems, Man, and Cybernetics: Systems (TSMC), 44(5): 630-641, 2014
[PDF]
[5] Hairong Jiang, Juan P. Wachs, and Bradley S. Duerstock, ''Integrated Vision-based System for Efficient, Semi-automated Control of a Robotic Manipulator'', International Journal of Intelligent Computing and Cybernetics (IJICC), 7(3): 253-266, 2014.
[PDF]
[6] Hairong Jiang, Bradley S. Duerstock, and Juan P. Wachs, ''An Analytic Approach to Decipher Usable Gestures for Quadriplegic Users'' in Proceedings of the 2014 IEEE International Conference on Systems, Man, and Cybernetics (SMC), October 5-8, 2014, San Diego, CA.
[PDF]
[7] Hairong Jiang, Ting Zhang, Juan P. Wachs, and Bradley S. Duerstock, ''Autonomous Performance of Multistep Activities with a Wheelchair Mounted Robotic Manipulator Using Body Dependent Positioning'' 2014 IROS, Workshop on Assistive Robots for Individuals with Disabilities: HRI Issues and Beyond, Chicago IL, USA, Sep 14, 2014.
[PDF]
[8] Ken Chen, Songkan Tang, Hairong Jiang, Juan P. Wachs, and Bradley S. Duerstock, ''Practical Implications for the Design of Mobile Assistive Robots for Quadriplegics Using a Service Dog Model'' 2014 IROS, Workshop on Assistive Robots for Individuals with Disabilities: HRI Issues and Beyond, Chicago IL, USA, Sep 14, 2014.
[9] Hairong Jiang, Juan P. Wachs, and Bradley S. Duerstock, ''An Optimized Real-time Hands Gesture Recognition based Interface for Individuals with Upper-level Spinal Cord Injuries'' Journal of Real-Time Image Processing (JRTIP), pp. 1-14, 2013.
[PDF]
[10] Hairong Jiang, Juan P. Wachs, and Bradley S. Duerstock, ''Integrated Vision-based Robotic Arm Interface for Operators with Upper Limb Mobility Impairments'' in Proceedings of the 2013 IEEE International Conference on Rehabilitation Robotics (ICORR), Seattle, WA, USA, June 24-26, 2013.
[PDF]
[11] Hairong Jiang, Juan P. Wachs, Pendergast Martin, and Bradley S. Duerstock, ''3D Joystick for Robotic Arm Control by Individuals with High Level Spinal Cord Injuries'' in Proceedings of the 2013 IEEE International Conference on Rehabilitation Robotics (ICORR), Seattle, WA, USA, June 24-26, 2013.
[PDF]
[12] Hairong Jiang, Juan P. Wachs, and Bradley S. Duerstock, ''Facilitated Gesture Recognition based Interfaces for People with Upper Extremity Physical Impairments'' in Progress in Pattern Recognition, Image Analysis, Computer Vision, and Applications, Lecture Notes in Computer Science, vol. 7441, pp. 228-235, 2012.
[PDF]
[13] Hairong Jiang, Bradley S. Duerstock, and Juan P. Wachs, ''Integrated Gesture Recognition based Interface for People with Upper Extremity Mobility Impairments'' in Proceedings in Advances in Human Factors and Ergonomics, vol. 8, pp. 546-554, 2012.
[PDF]
[14] Hairong Jiang, Bradley S. Duerstock, and Juan P. Wachs, ''Hand-gesture Recognition for Users with Mobility Impairments'' poster, Independence Science: Learning a New Direction Conference for Disability (ISLAND), West Lafayette, IN, Oct 28, 2011
[15] Hairong Jiang and Lin Cong, ''Application Issues of Virtual Reference Feedback Tuning and Non-iterative Correlation-based Tuning'' 2010 IEEE International Conference on Information and Automation (ICIA), Harbin, China, July, 2010
[16] Xinlu Yu and Hairong Jiang ''Controller Optimization with CRS algorithm for Linear Motor Driven XY Table'' Micromotors, vol. 10. 2009
[top]
Teaching & Working Experience
Teaching Assistant, School of Industrial Engineering, Purdue University (Fall 2013, Spring 2015)
- IE 474 Industrial Control Systems
Modern control systems with reference to automation of industrial machines and processes, including linear dynamic systems, feedback control, and elements of system analysis
System Engineer, Parallax Precision CO. LTD, China (Aug 2009 - Dec 2010)
- Designed motion control systems for Wire Bonding Machines (WBMs)
- Investigated algorithms for multi-loop precision position and force control for WBMs
- Developed algorithms to optimize WBMs’ motion trajectories and reduce vibration
[top]
Patents
Bradley S. Duerstock, Juan P. Wachs, and Hairong Jiang,
''Gesture Translation for Persons with Mobility Impairments'', Pending
Wei Cheng, Xinlu Yu, Jianjun Min, and Hairong Jiang,
''A Four-loop Precision Position/Force Hybrid Control Approach for Golden Wire Bonders'', CN101969034 A, September 3, 2010
[top]
Honors & Awards
Second Place of Poster Competition, Industrial Engineering Research Symposium, April 2015, Purdue University
Second Place of Poster Competition, Industrial Engineering Research Symposium, April 2014, Purdue University
Outstanding Graduate Student Award, 2010, Harbin Institute of Technology, China
National Scholarship, 2008, 2009, 2010, Harbin Institute of Technology, China
People's Scholarship, 2005, 2006, 2007, Harbin Institute of Technology,China
[top]
Other Activities
Volunteer, IEEE Conference on System, Man, and Cybernetics (SMC), 2014
Reviewer, IEEE Transactions on Biomedical Engineering, June, 2015
Reviewer, International Journal of Pattern Recognition and Artificial Intelligence, Aug, 2014
Member, Purdue Robotics and Automation Society, 2014-present
Member, IEEE Computer Society, 2014-present
Member, IEEE Robotics and Automation Society, 2014-present
Member, IEEE System, Man and Cybernetics Society, 2014-present
Member, IEEE Communication Society, 2014-present
Member, ACM Society, 2014-present
Host, 201 Studio, Harbin Institute of Technology, 2005-2006, China
Social Head, Qitian Science and Technology Symposium, Harbin Institute of Technology, 2005-2006, China
[top]
Proejcts & Insights
[top]
 LinkedIn: https://www.linkedin.com/in/hrjiang
LinkedIn: https://www.linkedin.com/in/hrjiang
